About me
Robotics Engineer with expertise in electromechanical modeling, SLAM, advanced path planning, ROS, control systems design, automation, and machine learning. Proficient in CAD modeling, adept at translating designs into functional prototypes with precision and efficiency. Demonstrated track record of developing innovative solutions in automation, ensuring optimal performance and resource efficiency. Skilled in writing flexible code tailored for solving complex problems and integrating autonomous systems.
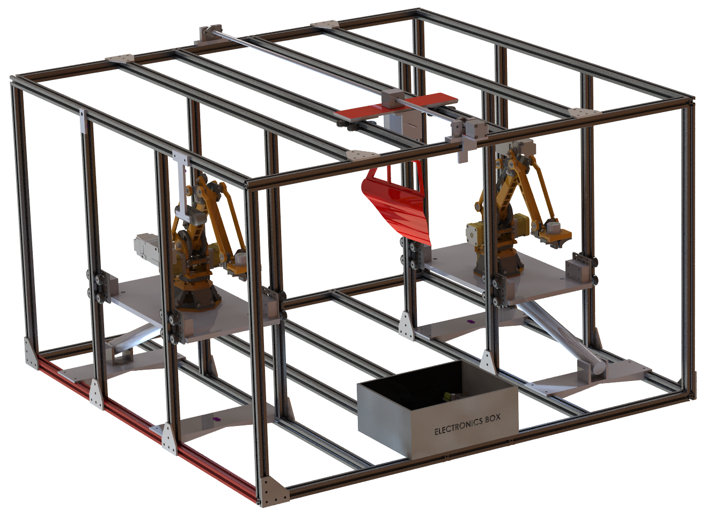
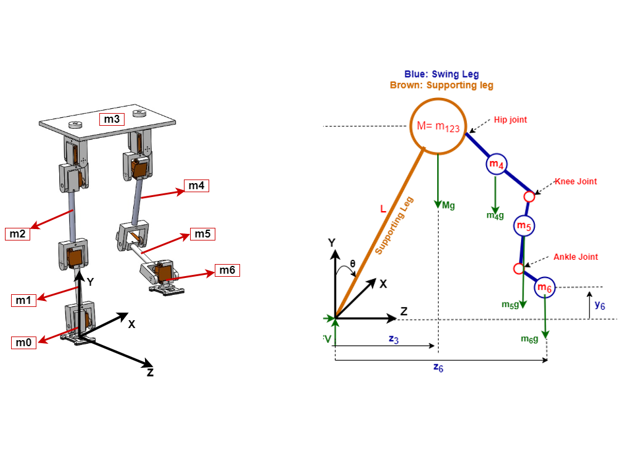
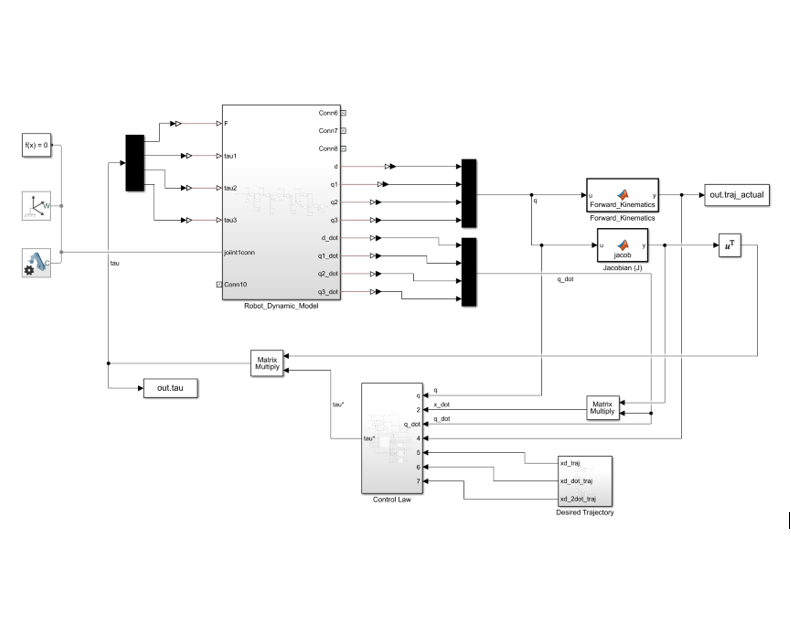
I achieved a significant milestone by developing an automated robotic system for industrial painting, currently undergoing patent filing, which reduced energy wastage by 51% and streamlined process time by 33%. My hands-on experience extends to working with ROS and Gazebo, where I honed my skills by crafting obstacle avoidance algorithm for a TurtleBot simulator. Moreover, I successfully desgined and simulated a bipedal walking robot in SIMULINK. I boast a specialization in Deep Learning and Data Science and have certifications in Robot Operating System. See the PORTFOLIO SECTION for more details!
Publications
-
Gabbar, H.A.; Idrees, M. ARSIP: Automated Robotic System for Industrial Painting. Technologies 2024, 12, 27. https://doi.org/10.3390/technologies12020027
-
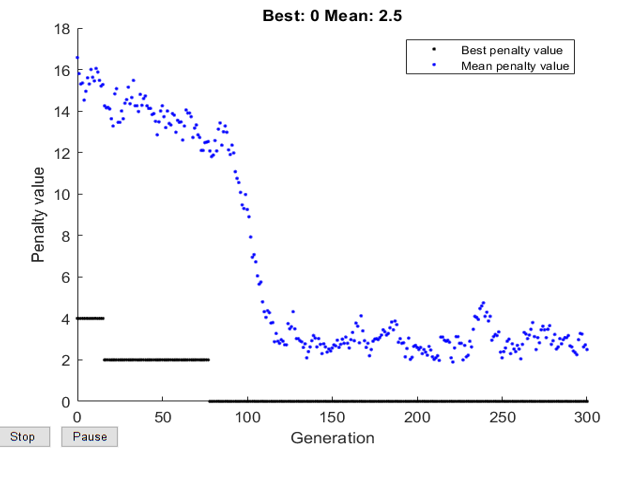
Idrees, M.; Gabbar, H.A. A hybrid optimization scheme for efficient trajectory planning of a spray-painting robot. In Proceedings of the 3rd International Conference on Robotics, Automation, and Artificial Intelligence (RAAI), Singapore, 14–16 December 2023
What i'm doing
-

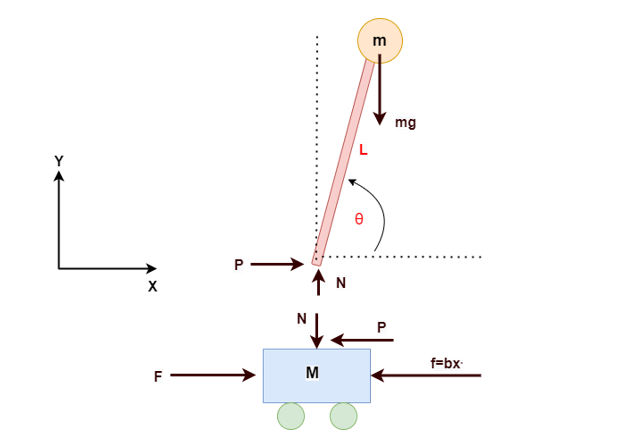
Electromechanical Modelling
Design and simulate any mechanical or electrical system in MATLAB & SIMULINK.
-

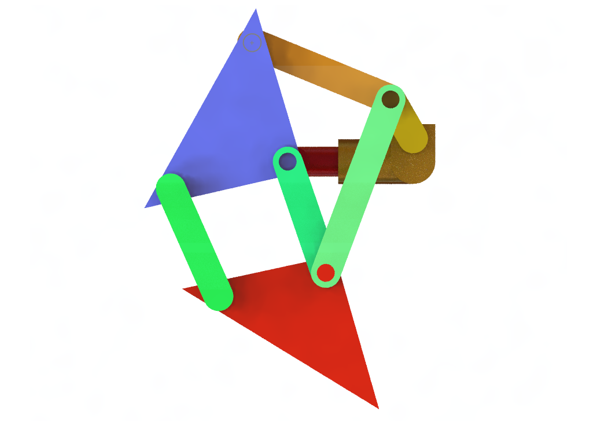
Robot Dynamics
Solve Kinematics and dynamics of serial-link and paraller manipulators in Python and MATLAB.
-
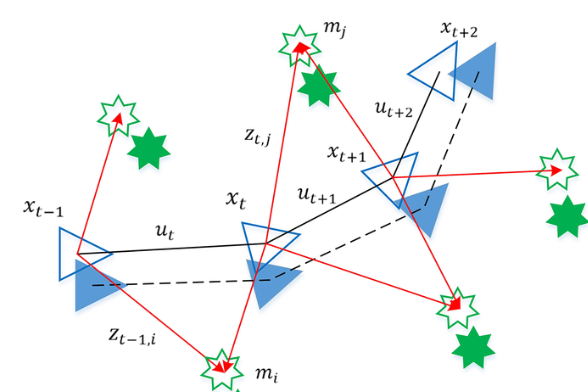
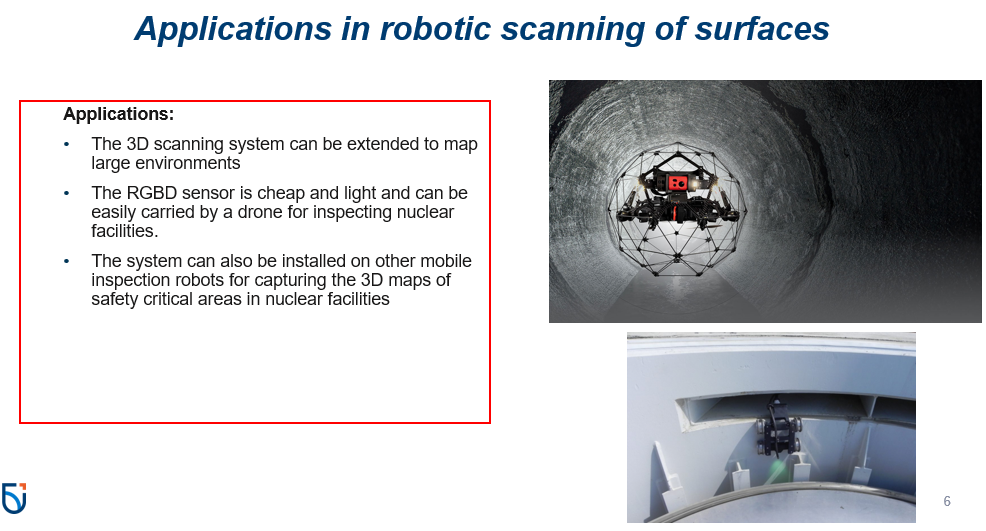
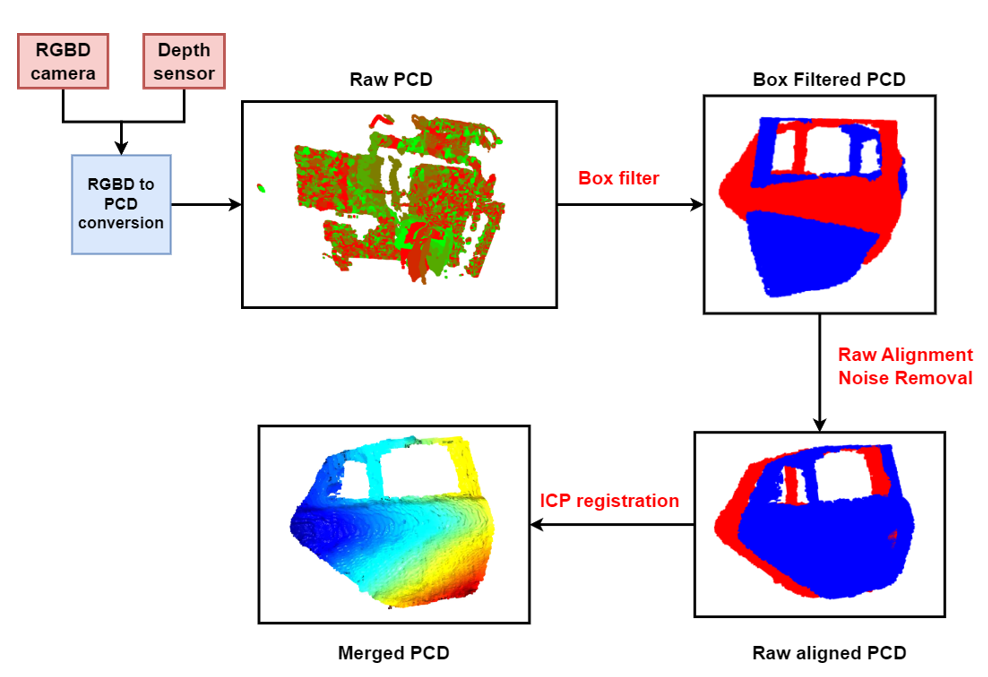
SLAM
Proficient in SLAM algorithms like GMapping, Cartographer, SLAM Toolbox, Hector SLAM.
-

ROS
Deep understanding of ROS1 and ROS2 topics, services, actions, launch, rviz, gazebo, nav2 etc.
-
Control Systems
Simulate Control Systems in MATLAB & SIMULINK.
-
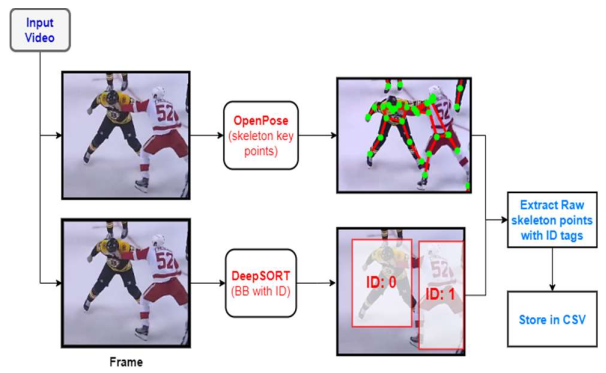
Deep Learning
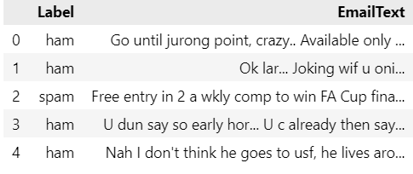
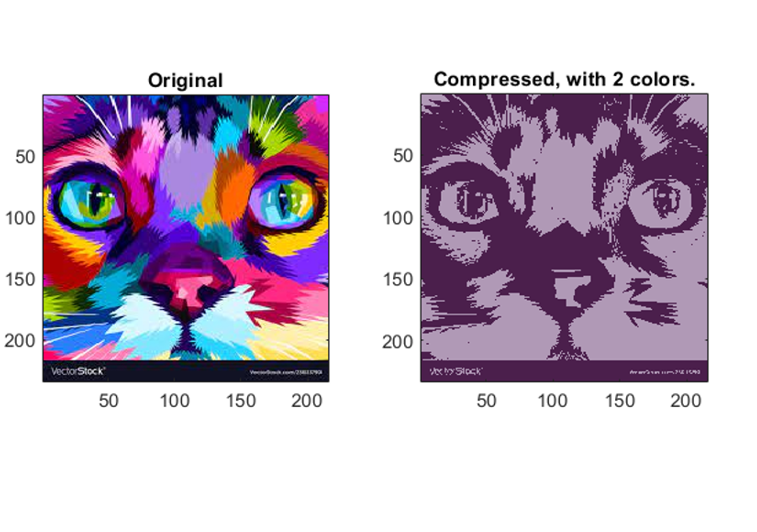
Create custom Deep Neural Networks in Python tensorflow.